这里总结了一些以前没有写过的知识点(主要是因为知识点比较少,就不专门写了),同时对于考纲内的知识点,会附上一些自己的看法。可能有纰漏,望读者指出。
1. 大概内容
- 最短路
- 最小生成树与次小生成树
- 欧拉回路
- Tarjan 与缩点,割点、桥
- 二分图
- 差分约束
- 拓扑排序
- 最近公共祖先与倍增
(一时想不起了,提高组考察似乎就这么多……
2. 详细内容
1)最短路
最短路估计是大家见过最多的图论了,因为这个算法虽然简单,但是变化莫测,难度几乎没有上限,甚至各种高级算法的基础是它(费用流等),还可以和各种题型进行结合,导致难度骤增。
关于算法,四种,不用多说:Floyd,Dijkstra,Bellman-Ford,SPFA。
考场上的选择:一般使用 Dijkstra,不要使用 SPFA(因为最坏复杂度太差,而且能被卡死,除非明摆着的 Dijkstra 过不了的时候,还能一些 (满) 分),多源求最短路用 Floyd,特殊情况用 Bellman-Ford。
前面三种的区分比较明显,因为时间复杂度不同,Dijkstra 是 $O(m\log n)$,SPFA 是 $O(km)$,Floyd 是 $O(n^3)$。
什么是 Bellman-Ford 的特殊情况呢?
比如这样一道题。
给定一张有向图,求对于每一个 $k\in[1,n-1]$,求源点 $1$ 到每一个点走不超过 $k$ 条边的最短路。为了了避免输出量极大,对于每一个 $k$,输出所有最短距离的异或和即可。无法到达的点设其最短距离为 $u\times1\times10^{14}$,$u$ 为其编号。$n\leq1000,m\leq5000,w_i\leq10^7$
这个就是一个经典的 Bellman-Ford 算法了。
1 | const ll INF = 1e14; |
此外,感谢 @phigy 的建议,加上了最短路 DAG 的问题。
对于单源最短路来说,有一些边满足 $dis(i)=dis(j)+w(j,i)$,那么 $e(j,i)$ 就会在新图中,这就构成了最短路 DAG。
从 DAG 的源点开始走,任意走都是最短路——这个是比较特殊的性质。
1 | void get_DAG(int st) |
比如这个题就是一个经典的题。
给定一张 $n$ 个点,$m$ 条边的有向图和起点 $S$,求$S$ 到每一个点最短路的路径条数。
这个直接在 DAG 上 bfs 就可以了。
还有一个:
给定一张 $n$ 个点,$m$ 条边的有向图和起点 $S$、终点 $T$,求 $S$ 到 $T$ 的最短路的必经边(即删除这条边后会导致最短路变大)。
比较难的解法是 支配树,先求出 DAG 后,再求支配点。
但是一个偷懒的方法是:假设 $e(i,j)$ 满足 $count(S,i)*count(j,T)=count(S,T)$,其中 $count(i,j)$ 表示 $i$ 到 $j$ 的最短路径数。
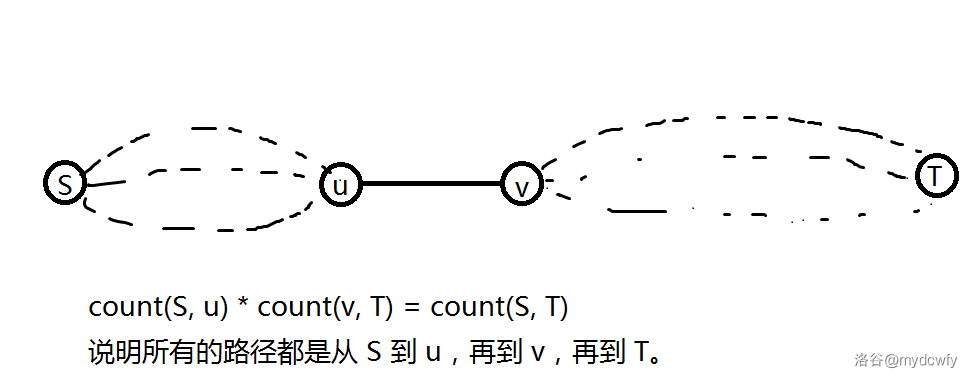
证明也很简单:如果两边的 $count$ 乘积等于总数的话,那么就不会存在其他路径了,也就是必经边了。
但是有可能爆 long long,所以使用 Hash。
2)最小生成树 & 次小生成树
最小生成树算法分别有 Kruskal($O(m\log n)/O(n\alpha(n))$),Prim($O(n^2)$),区别也很简单,稀疏图用 Kruskal,稠密图(用邻接矩阵存的)用 Prim。
推荐一个水题:P5994 [PA2014]Kuglarz
使用 Prim,时间复杂度为 $O(n^2)$。
同时一些题目本身是图,我们需要将其转化为一棵树,使答案可以很好计算。而转化为最小生成树是答案所求,所以我们先最小生成树。
注意,这里与最短路径 DAG 是有区别的,因为我们要根据不同的题目,具体选择需要的算法。
(这个找不到例题了……
次小生成树(严格)的模板题:P4180 [BJWC2010]严格次小生成树
这个是倍增的好题,我们马上再讲。(?
3)欧拉回路
博客讲得差不多了,我们就不啰嗦了,但是要强调的一个是:注意要先更新 $head$,然后再遍历,否则复杂度会假掉!
看一下最开始也是一般的代码:
1 | void dfs(int x) |
注意,当我们 dfs(e[i]) 的时候,会导致我们当前的这个点的当前这一条边 $i$ 还没有被踢出 head[],因为有回路导致重新遍历到这个点,可能会导致时间复杂度假掉。
正确的应该是这样:
1 | void dfs(int x) |
就避免了这种情况,
推荐一个题:P1127 词链
如果我们把这道题看作是哈密尔顿回路的话,那肯定就解不出来。
考虑将词语转化为边,然后将首尾字符变为点,就是欧拉回路了。
也涉及到了字符串,可能有一点麻烦。
4)Tarjan 缩点、各种双连通分量
这个真得不想再写博客了……
大概我那篇讲的挺清楚 吗?
5)二分图
这个要注意染色法,最大匹配,Konig 定理,最大独立集几个知识点。
染色法其实是比较简单的,至少是 NOI 大纲-提高组区 里的。
但是不代表其他的不考!
虽然考得比较少,但是不能说不可能。
匈牙利算法好打,一般不要使用 dinic 等(打错就尴尬了
6)差分约束
差分约束似乎不被重视,但是 2021 联合省选 D1T2 就考到了。
所以,还是要学习。
一般只能使用 SPFA(完全图除外),因为没法跑 Dijkstra。
还是要注意:最小值跑最长路,最大值跑最短路!
其他没什么说的了。
7)拓扑排序
这个比较简单了,只能在 DAG(有向无环图)上使用。
一般有 DAG DP 问题。
8)最近公共祖先
a. 暴力
选择深度较大的点向上跳,直到碰到为止。
时间复杂度为 $O(n)$。
1 | int LCA(int x, int y) |
主要用在树的形态会发生改变的时候。
b. 倍增
考虑优化暴力。
我们可以预处理,对于每一个 $x$,$f[x][i]$ 表示 $x$ 的 $2^i$ 次跳过后走到的节点。
首先跳到同一深度。
然后 $i$ 从大向小枚举,如果跳到的位置不同,就可以跳。
这样的话,一定只剩一步就跳到相同的位置了。
时间复杂度为 $O(n\log n)-O(\log n)$
1 | const int N = 1e5 + 10, L = 19; |
大家应该都知道吧
c. Tarjan(跳过
d. ST 表
考虑 dfn 序(话说我在网上找了很久,dfn,euler,dfs 序各家说法不一,我也不太清楚
大致思路是:遍历到一个点的时候加在序列末尾,记当前位置为 $fi(x)$,然后它的一个子树走到另一个子树时,也要将 $x$ 加在序列末尾。
得到的序列可以证明不会超过 $2\times n-1$。
然后,我们找 $lca(x,y)$ 时,可以在序列里 $[fi(x), fi(y)]$ 中找到深度最小的点,一定就是答案。
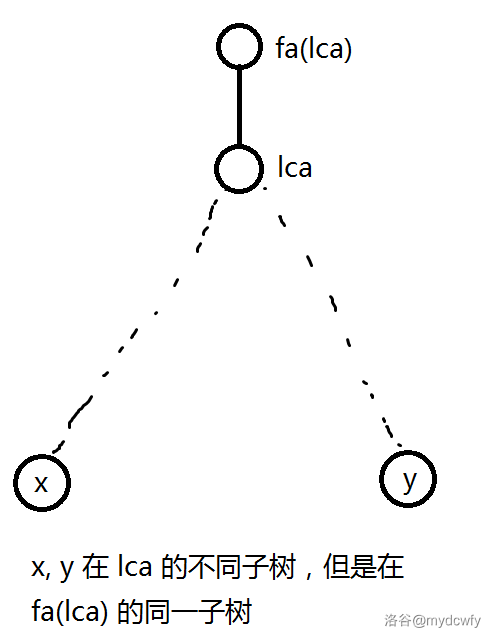
为什么呢?原因很简单:因为 $[fi(x),fi(y)]$ 之间,一定会有 $lca$ 的出现,因为 $x,y$ 在 $lca$ 的不同子树,遍历不同子树的时候会记下 $lca$。
很明显,$lca$ 上面的 $fa(lca)$ 是不会在这之间的,因为 $x,y$ 是同一子树。
剩下的可以使用 ST 表维护了。
时间复杂度 $O(n\log n)-O(1)$
1 | const int N = 1e5 + 10, L = 20; |
9)倍增
这个看似简单,我们拿两道题来看一下(前面的严格次小生成树在这里)。
T1:严格次小生成树
这个我们慢慢讲。
首先,我们跑一遍最小生成树,然后我们考虑再加入一条边,然后删除一条边。
很明显,假设一条边是 $e(u,v)$,我们应该删除 $u,v$ 路径上的一条边。
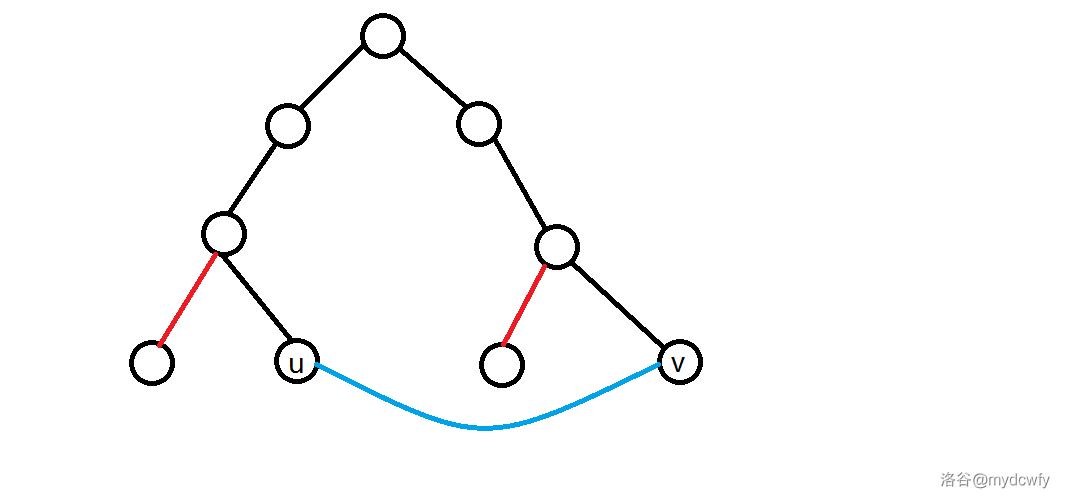
黑色的边就是我们可以删除的边,因为只有这些边中的一个被删除,原图仍然是树。
还可以得到一个结论:$\max_{e\in P(u,v)}(e.w)\leq w(u,v)$。($P(u,v)$ 是指这条路径)
这个也显然,因为如果有边大于 $w(u,v)$ 的话,我们可以用 $w(u,v)$ 替换它,就答案更小了。
回到本题,我们删除哪条边呢?
明显应该删除 $P(u,v)$ 最大的边啊!(这样答案才最小
但是,得有一个前提:$\max_{e\in P(u,v)}(e.w)<w(u,v)$,否则就不是严格的了。
碰上 $=$ 怎么办呢?我们就删除次大边就是了。
那么,现在我们处理的问题就是怎样找到最大边和严格次大边。
倍增就可以解决这个问题了。
$g[x][i][0]$ 表示 $x$ 向上跳 $2^i$ 所经历的边的最大值,$g[x][i][1]$ 为严格次大值。
回顾 $\text{LCA}(x,y)$ 的算法,我们就可以处理了。
1 | void dfs(int x, int fa)//预处理 |
T2:跑路
这个题其实是比较简单的倍增题目。
因为这里明显在提示 $2^k$,所以我们考虑倍增求一次能达到的点。
$a[bit][i][j]$ 表示经过 $2^{bit}$ 次边,$i,j$ 是否互达。
这个可以使用 Floyd,$a[bit][i][j]|=a[bit-1][i][k]\odot a[bit-1][k][j]$。
对于 $d(i,j)$,$\exists bit\in[0,30],a[bit][i][j]=1$,则 $d(i,j)=1$。
然后 Floyd 跑就可以了。
1 | for (int bit = 0; bit < 31; ++ bit) |
T3:电阻网络
(作为习题了吧
首先是可以分治的,然后对于并联电路,求最早交点。
可以倍增找交点,有点像 LCA。
这个不具体讲了。